|
好评后赠送仿真功能包,请联系客服索要。 如果在仿真过程中出现一些奇奇怪怪问题,一般为虚拟机性能不足,可尝试增加虚拟机cpu数量和内存 在启动仿真环境的前提下,
hawkbot@ubuntu命令行下 roslaunch hawkbot navigation.launch 此时节点正在启动,终端会输出启动信息,等待出现下图启动完成界面。
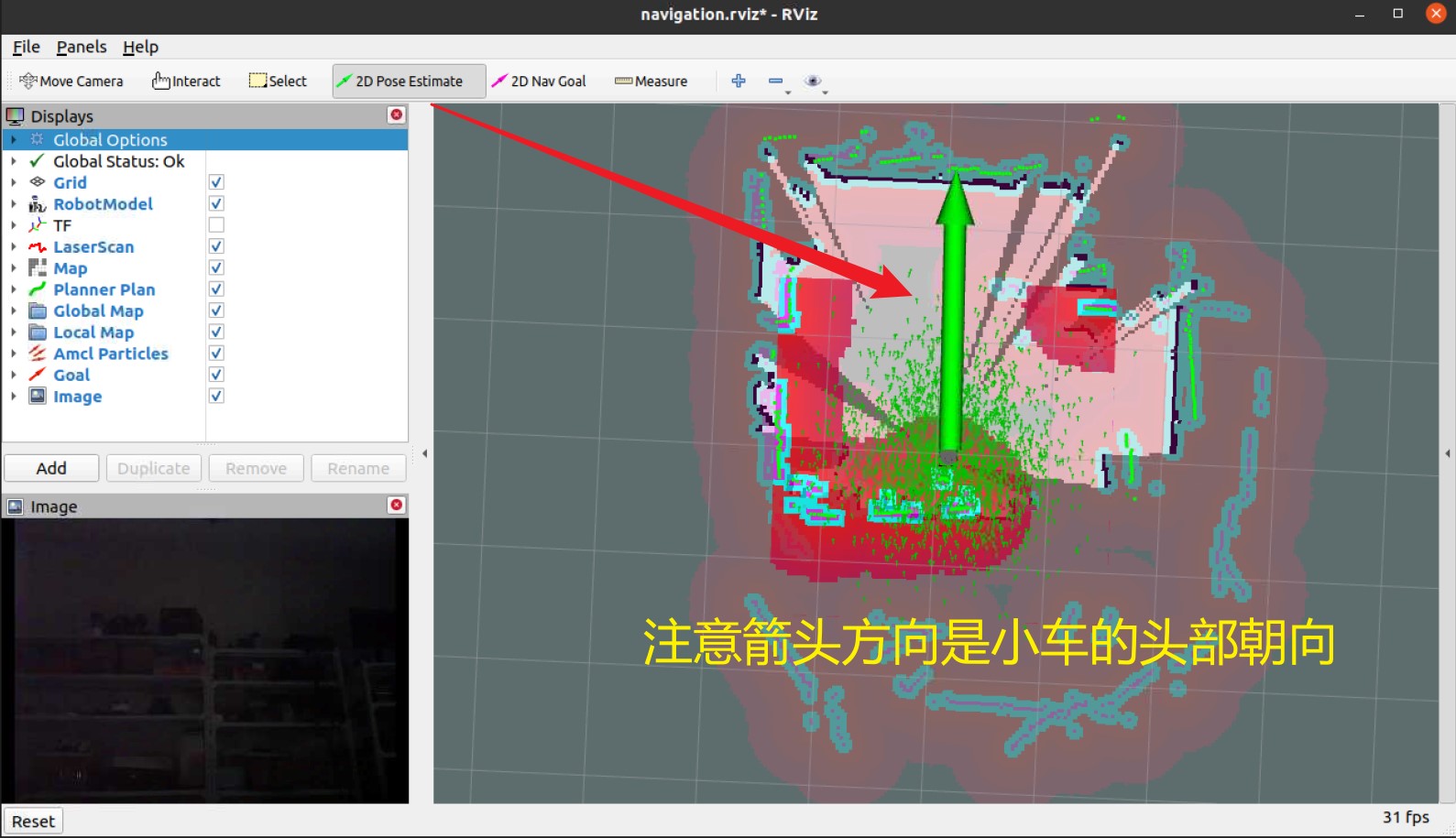
标定机器人当前位置和朝向,点击“2D Pose Estimate”按钮,将机器人的大体位置和朝向在地图中标出,箭头的尾部为 ROS 机器人的位置,箭头的方向为ROS 机器人的朝向。
利用“2D Nav Goal”按钮发布一个目标位置,ROS机器人即可自动导航与避障到达目标位 置。
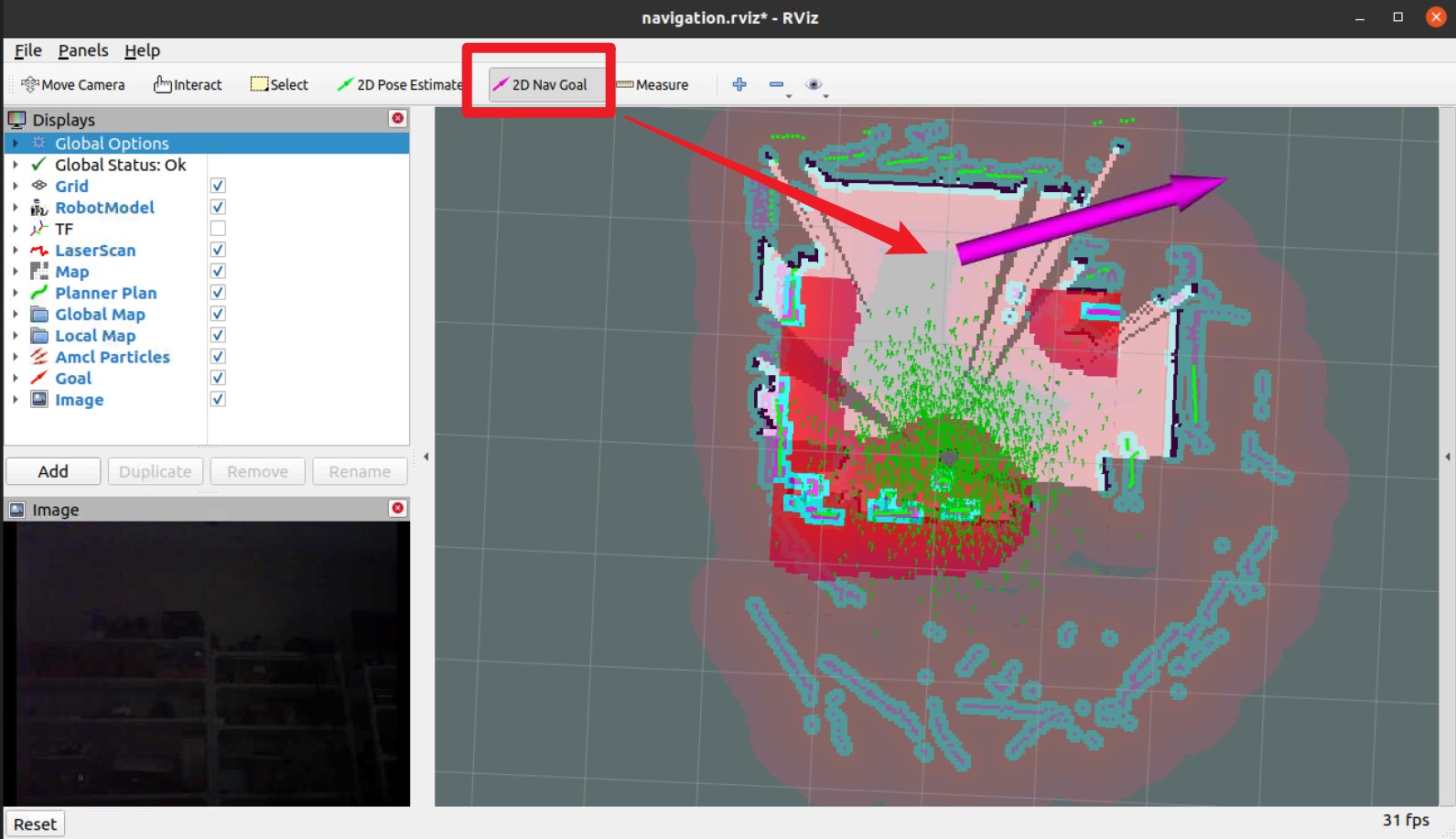
随着小车的移动,小车在地图中的定位会越来越精确,界面上的绿色箭头会越来越聚集。小车的导航和避障就会越来越精确。
| 
 发表于 2024-6-30 21:39:49
发表于 2024-6-30 21:39:49