|
###使用前,请先注册并登录网站,登录后显示完整图片!### 本节使用 karto 算法进行机器人建图,karto salm 是基于图优化的方法,图优化方法利用图的均值表示地图,每个节点表示机器人轨迹的一个位置点和传感器测量数据集,箭头的指向的连接表示连续机器人位置点的运动,每个新节点加入,地图就会依据空间中的节点箭头的约束进行计算更新。karto slam 需要里程计和激光雷达数据。 快捷方式:
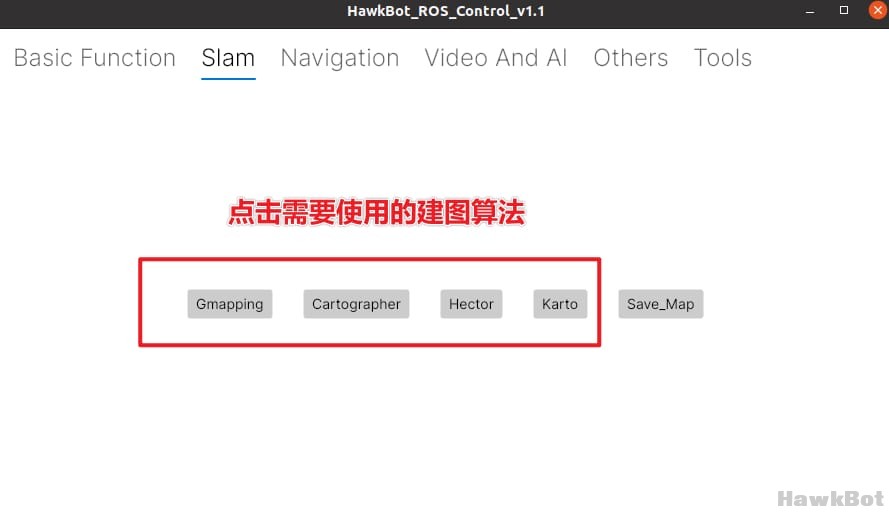 手工方式:
手工方式: 虚拟机hawkbot@ubuntu命令行下 roslaunch hawkbot karto_slam.launch

| 
 发表于 2023-4-18 13:28:55
发表于 2023-4-18 13:28:55
